
/s.siteapi.org/ecccbd9e64f4bd8/img/6u13tp3gja80o4ow8kcsg84sww40wg "Датчик столкновения CAT3 PRO для сварочных роботов")
Датчик столкновения CAT3 PRO для сварочных роботов

При больших объемах производства и длительном времени цикла столкновения во время роботизированной сварки неизбежны. Столкновение во время сварки в процессах MIG/MAG и TIG - сварочной горелки с заготовкой или элементами установки может привести к деформации изнашиваемых деталей на горелке, повреждению заготовки и разрушению самой горелки робота. Каждый ремонт и замена сварочной горелки приводят к потерям времени, и, как следствие, к материальным издержкам. Время простоя может дорого обходиться компании. Если простои случаются чаще запланированного, это может быстро привести к сокращению прибыльности производства. Автоматическая защита от столкновения на держателе горелки робота эффективно решает эту проблему. При этом она должна быть прочной и надежной. CAT3 PRO от ABICOR BINZEL является идеальным решением для этого.
Датчик столкновения CAT3 PRO, доступный в версиях CAT3 PRO CR (с цилиндрическим спусковым фланцем) и CAT3 PRO TR (с коническим спусковым фланцем) — это новое устройство, которое еще лучше защищает сварочную горелку и ее оборудование от столкновений. CAT3 PRO обеспечивает немедленное выключение робота при столкновении, таким образом, предотвращает его повреждение. Благодаря отличной повторяемости сброса, после устранения причины столкновения сварочный робот снова становится доступным без перенастройки точки центра инструмента. Данная система крепления горелки от АБИКОР БИНЦЕЛЬ предназначена для установки на стандартные сварочные роботы с внешним креплением шлангового пакета.
Лучше всего: без необходимости перепрограммирования робота, CAT3 PRO CR и CAT3 PRO TR от АБИКОР БИНЦЕЛЬ легко заменяют собой предыдущие версии датчиков столкновения:
- CAT2
- CAT2-HL
- CAT3
Особенности CAT3 PRO
В тяжелых промышленных условиях к сварочной оснастке и всему сварочному оборудованию предъявляются чрезвычайно высокие требования. Особое внимание уделяется качеству и безопасности, чтобы максимально сократить время простоя. Датчики столкновения CAT3 PRO CR и CAT3 PRO TR со встроенной защитой от отключения еще более стабильны и прочны по сравнению с их прежними версиями CAT3, CAT2 и CAT2-HL. Повторяемость сброса (TCP) для сварочных горелок была дополнительно улучшена, что сокращает время простоя до абсолютного минимума.
Главное преимущество: каждый, кто использовал прежде CAT2, CAT2-HL или CAT3 может легко перейти на CAT3 PRO CR с цилиндрическим спусковым фланцем или CAT3 PRO TR с коническим спусковым фланцем. Почему? У CAT3 PRO CR точно такое же крепление, как и у CAT2; CAT3 PRO TR имеет такое же крепление, как у CAT3 и CAT2-HL.
Датчик столкновения CAT3 PRO CR

Датчик столкновения CAT3 PRO TR

Отличия от САТ2 и САТ3
- Более стабильный и надежный
- Поддерживает точность координаты TCP
- Не требуется перепрограммирование робота
Коротко о преимуществах CAT3 PRO
Новое поколение универсальных датчиков столкновения CAT3 PRO обеспечивает простую и надежную защиту благодаря следующим свойствам:
- Улучшенная производительность благодаря практичному и прочному исполнению
- Простая установка на сварочный робот
- Надежное срабатывание
- Высокая точность сброса (TCP) и приведенное к минимуму время простоя
- Жесткость пружин XL, L, и M (S в качестве опции) обеспечивают простоту регулировки в зависимости от веса инструмента
- Облегченная замена деталей и ремонт
- Безупречная защита от грязи
- 100 % совместимость с CAT2, CAT2-HL и CAT3
Технические характеристики CAT3 PRO
| Габариты: | Ø 77 мм, высота 106 мм |
| Масса: | 960 г (без держателя и фланца) |
| Усилие отклонения: | (см. рис 1) Отклонение CAT3 PRO CR / CAT3 PRO TR |
| Точка срабатывания: |
|
| Макс. отклонение: |
|
| Точность сброса: | (см. рис 2) В направлениях X, Y и Z: ± 0.04 мм (на расстоянии 400 мм от фланца робота) |
| Класс защиты IP: | IP 21 |
| Макс. значения тока и напряжения: | 30 В / 100 мA |
| Рабочая температура: |
|
| Относительная влажность: |
|
Рис. 1:
Усилие отклонения датчиков CAT3 PRO CR и CAT3 PRO TR
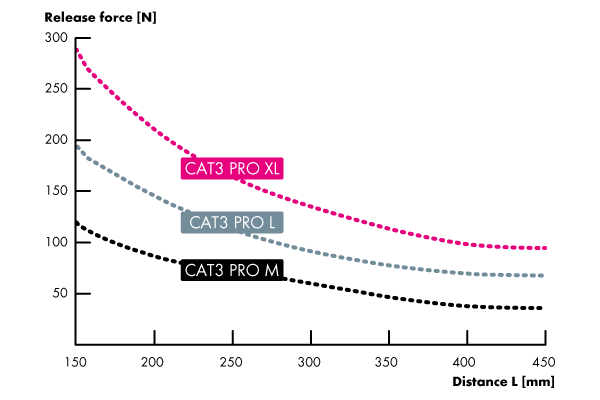
На представленном графике изображена зависимость усилия отклонения от расстояния до фланца робота для CAT3 PRO с пружинами XL, L и M.
Рис. 2:
Максимальное отклонение в направлении X и Y
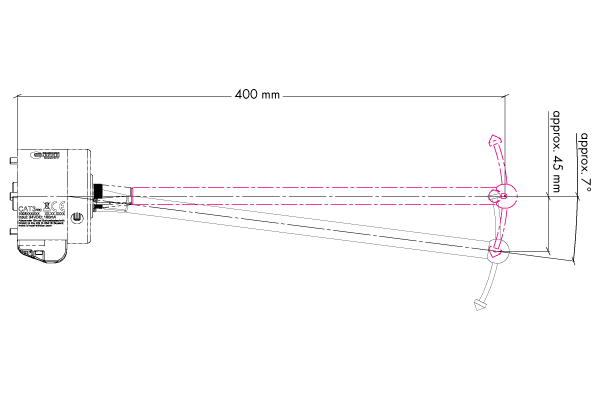
Направление X-, Y- и Z: ± 0.04 мм (на расстоянии 400 мм от фланца руки робота)